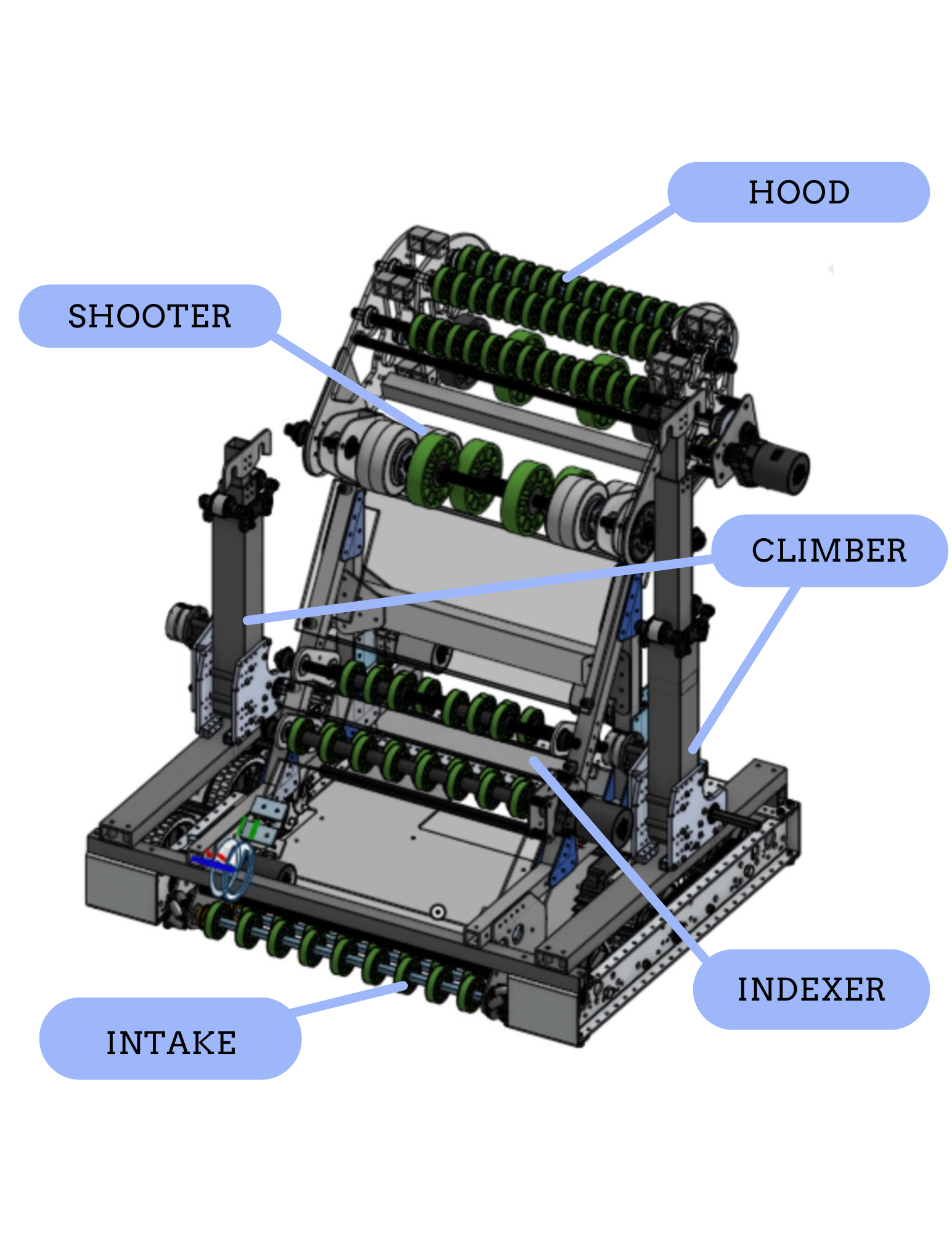
 ◉ completed · 2024
Calliope · FRC Team 6418
◉ completed · 2024
Calliope · FRC Team 6418
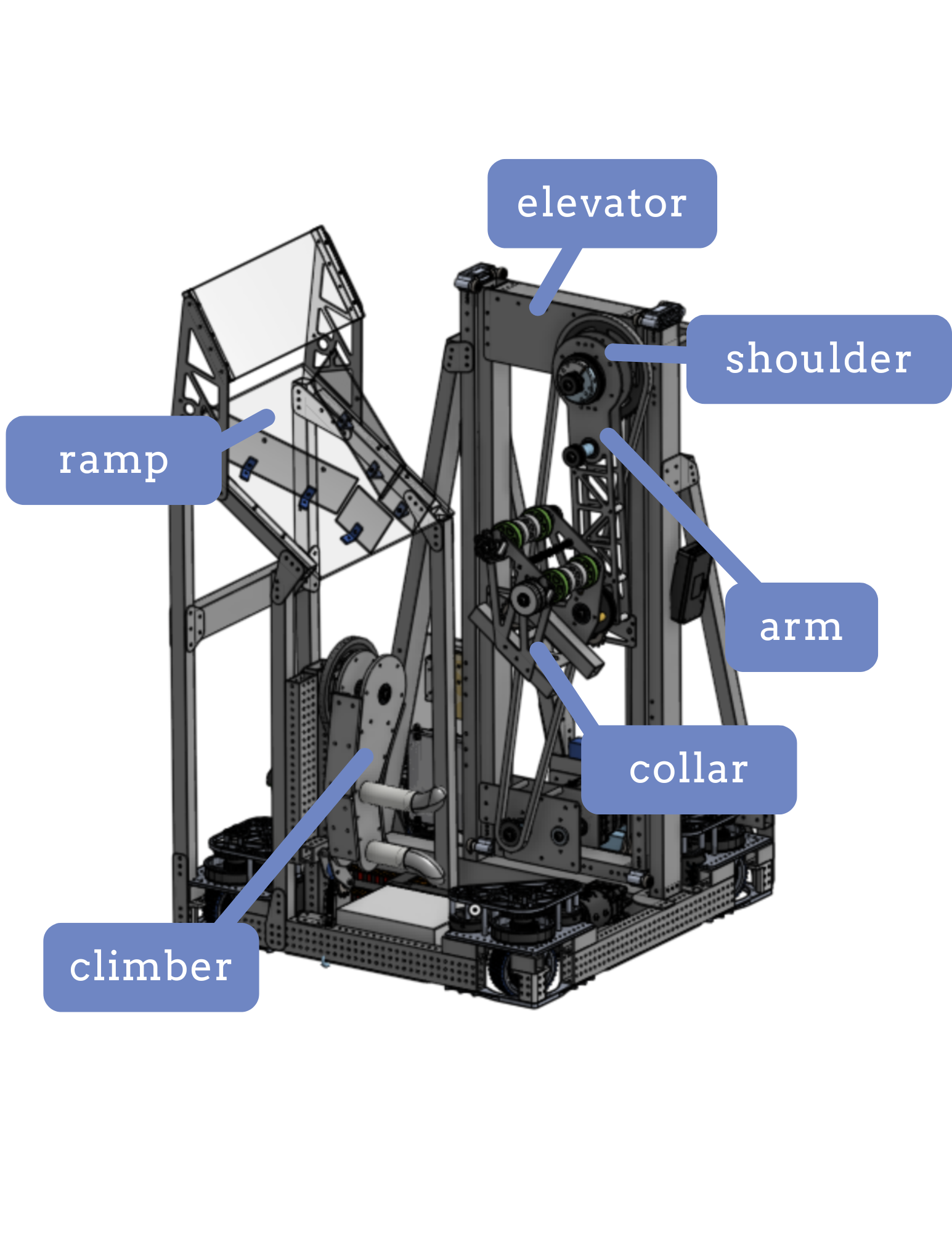 ◉ completed · 2025
Dynamene · FRC Team 6418
◉ completed · 2024
Calliope · FRC Team 6418
◉ completed · 2025
Dynamene · FRC Team 6418
◉ completed · 2025
Dynamene · FRC Team 6418
◉ completed · 2024
Calliope · FRC Team 6418
◉ completed · 2025
Dynamene · FRC Team 6418